Selsyn: svrha, uređaj, princip djelovanja
 Selsyni su posebna vrsta izmjeničnog električnog stroja snage od nekoliko vata do nekoliko stotina vata (manje od kilovata). Služi selsynu za daljinski električni prijenos mehaničkog kuta rotacije između uređaja koji nemaju međusobnu mehaničku vezu.
Selsyni su posebna vrsta izmjeničnog električnog stroja snage od nekoliko vata do nekoliko stotina vata (manje od kilovata). Služi selsynu za daljinski električni prijenos mehaničkog kuta rotacije između uređaja koji nemaju međusobnu mehaničku vezu.
Svaki selsin ima stator i rotor na kojima se nalaze namoti izmjenične struje. Postoje zavojnice s jednim namotom na statoru i namotom s tri namota na rotoru, i obrnuto, s namotom od tri namota na statoru i namotom s jednim namotom na rotoru, i konačno, s namotom s tri namota na statoru i s istim namotom na rotoru.
Prema njihovoj namjeni u shemama autoregulacije, selsyni se dijele na:
- selsyn senzori,
- prijemnici selsyn
- diferencijal.
Da biste razumjeli rad selsyna, razmotrite sl. 1, a.
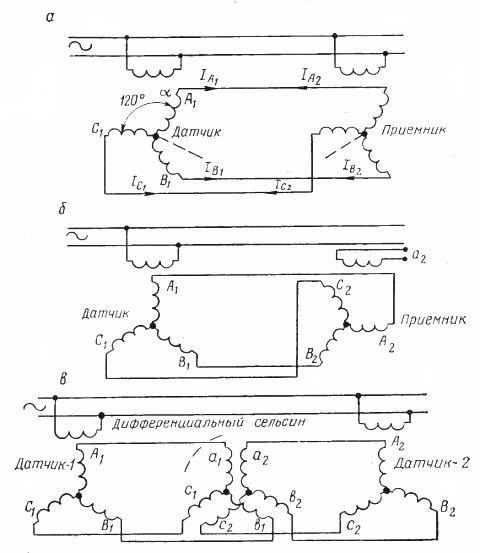
Riža. 1. Sheme za uključivanje selsina: a — prema sustavu senzor — prijemnik; b — prijemnik transformatora u transformatorskom načinu rada; c — diferencijal
Selsyn-senzor i selsyn-prijemnik sa svojim jednonamotnim statorskim namotima spojeni su na istu izmjeničnu mrežu, a tronamotni namoti rotora međusobno su povezani. Ako sada okrenete rotor senzora pod bilo kojim kutom, rotor prijemnika će se okrenuti pod istim kutom. Ako se rotor senzora rotira kontinuirano nasumičnom brzinom, tada će se rotor prijemnika okretati istom brzinom.
Djelovanje Selsinove veze temelji se na principu elektromagnetske indukcije, koji je sljedeći. Izmjenična struja u namotu statora s jednim namotom inducira struje u namotu rotora s tri namota, čije vrijednosti ovise o relativnom položaju namota rotora i statora.
Ako su rotori dva selsina jednako razmaknuti u odnosu na njihove statore, struje u spojnim žicama rotora su jednake i suprotne jedna drugoj, pa je stoga struja u svakom svitku nula. Kao rezultat toga, moment osovine oba selsyna je nula.
Ako sada ručno ili na neki drugi način okrenete rotor selsin senzora pod određenim kutom, tada će se poremetiti ravnoteža struja između rotora, a na osovini selsin prijemnika će se pojaviti zakretni moment, zbog čega će se njegov rotor okretati , dok neravnoteža struja nestane.To jest, dok ovaj rotor ne zauzme isti položaj kao sinkrosenzor.

U sustavima autoregulacije prijemnik selsyn često radi u transformatorskom načinu rada (slika 1, b). U ovom slučaju, rotor prijemnika je fiksiran nepomično, a njegov namot statora je isključen iz mreže. U ovom svitku se inducira e. itd. v. sa strane rotora, kroz čije namote teku struje zbog položaja rotora senzora selsyn.To znači da je vrijednost e. itd. s terminalima, rotor prijemnika je proporcionalan kutu zakreta senzora.
U početnom položaju, rotori su pomaknuti za 90 ° relativno jedan prema drugom, au ovom slučaju e. itd. s. je nula. Sada kada se senzor rotora okrene, e će biti induciran na rotoru prijemnika. itd. s Ep, proporcionalan kutu divergencije rotora
Epr = Emax x sinθ
Diferencijalni selsin se koristi u slučajevima kada je potrebno kontrolirati razliku u kutovima rotacije dviju osi, tj. njihov nesklad. U ovom slučaju dva senzora selsina nalaze se na dvije osovine čije se brzine međusobno uspoređuju.Rotori ovih selsina su tronamotnim namotima povezani s tronamotnim namotima statora i rotora trećeg. selsin, koji je diferencijal (slika 1, in). Kut rotacije selsyn diferencijalnog rotora jednak je razlici između kutova rotacije selsyn senzora.