Električno vratilo i njegova primjena u elektropogonu strojeva za rezanje metala
 U članku se govori o uređaju, principu rada i primjerima primjene električnih sustava za sinkronu rotaciju (električne osovine) u strojevima i instalacijama za rezanje metala.
U članku se govori o uređaju, principu rada i primjerima primjene električnih sustava za sinkronu rotaciju (električne osovine) u strojevima i instalacijama za rezanje metala.
Pretpostavimo da se dvije osovine koje nisu mehanički povezane jedna s drugom moraju okretati istim brzinama bez okretanja jedna u odnosu na drugu. Da bi se osigurala takva sinkrona i rotacija u fazi s motorima D1 i D2, koji rotiraju osovine A, odnosno II (slika 1), spojite pomoćne asinkrone strojeve A1 i A2 s faznim rotorima. Namoti rotora ovih strojeva međusobno su povezani.
Ako su brzine vrtnje dvaju strojeva i položaji njihovih rotora isti, tada su elektromotorne sile inducirane u namotima rotora strojeva A1 i A2 jednake i usmjerene jedna prema drugoj (slika 2, a), a struja ne teče u krugu rotora.
Pretpostavimo da se smjer vrtnje polja pomoćnih strojeva poklapa sa smjerom vrtnje njihovih rotora.Kako se rotacija stroja A2 usporava, njegov rotor će zaostajati za rotorom A1, što rezultira e. itd. c. Ep2 induciran u namotu rotora pomaknut će se u fazi prema unaprijed (slika 2, b), au krugu rotora strojeva A1 i A2 pod djelovanjem vektorskog zbroja e. itd. uz E se pojavljuje struja izjednačenja Az.
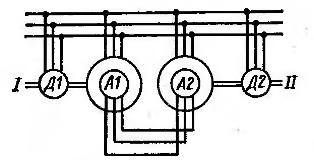
Riža. 1. Shema sinkrone komunikacije
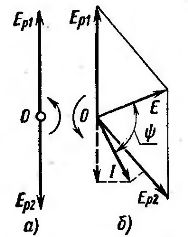
Riža. 2. Vektorski dijagrami sinkronog komunikacijskog sustava
Trenutni vektor I će zaostajati za vektorom e. itd. s E u kutu φ... Projekcija vektora struje Az na vektor e itd. v. Ep2 poklapa se s ovim vektorom u smjeru. Projekcija vektora struje na vektor e. itd. str.. Na njega je usmjeren Ep1. Slijedi da će stroj A2 raditi u motornom režimu, a stroj A1 u generatorskom režimu. U tom slučaju, vratilo stroja A2 će biti ubrzano, a vratilo stroja A1 će biti usporeno. Na taj način će strojevi razviti momente koji vraćaju sinkronu rotaciju osovina. I i II i prethodni koordinirani položaj u prostoru rotora strojeva A1 i A2. Rotori ovih strojeva mogu se okretati iu smjeru vrtnje polja iu suprotnom smjeru.
Ovaj sustav se naziva električni sinkroni rotacijski sustav... Također se naziva i električna osovina... Sinkroni rotacijski sustav može zamijeniti, na primjer, vodeće vijke u tokarilicama za rezanje vijaka.
Budući da pogonski krugovi strojeva za rezanje metala, u usporedbi s krugovima glavnog gibanja, obično troše malu snagu, može se koristiti jednostavnija shema sinkrone rotacije za sinkronizaciju glavnog gibanja s posmakom (slika 3).U ovom slučaju neizbježna je stalna neusklađenost položaja rotora strojeva A1 i A2, bez koje ne bi bilo struje u krugu rotora stroja A2 i on ne bi mogao svladati moment otpornih sila opskrbni krug. Budući da stroj A2 dobiva snagu od statora i rotora, ovaj sustav električne osovine zahtijeva šestožičnu vezu s motorom, instaliranu u mnogim slučajevima na pokretnom bloku stroja, obično prikazanom na slici isprekidanom linijom.
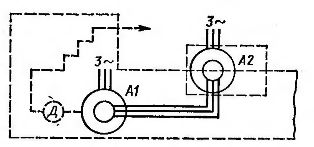
Riža. 3. Sinkroni komunikacijski sustavi teškog pužnog tokarskog stroja
Unutar kutnog odstupanja, koje ne prelazi 90 °, povećava se električni moment sinkronizacije. Da bi se osigurao značajan sinkronizacijski moment, sinkroni komunikacijski strojevi na svim mogućim kutnim frekvencijama rotacije moraju raditi s velikim klizanjem (ne manjim od 0,3 - 0,5). Stoga ti strojevi moraju biti dovoljno veliki kako bi se izbjeglo neprihvatljivo zagrijavanje.
Snaga strojeva dodatno se povećava u pokušaju da se eliminira utjecaj fluktuacija opterećenja i sila trenja. Koriste se i mehanički prijenosnici koji smanjuju frekvenciju vrtnje vratila stroja i sukladno tome veličina kutne pogreške svedene na vratilo stroja.Prije početka rada električnog vratila asinkroni strojevi A1 i A2 spojeni su na jednofazno napajanje. U tom slučaju rotor stroja A2 zauzima početni položaj koji odgovara položaju rotora stroja A1.
Sinkroni rotacijski sustavi racionalno se koriste za strojeve za rezanje teških metala, budući da je proizvodnja dugih vodećih vijaka povezana sa značajnim poteškoćama.Osim toga, povećanjem duljine vijaka ili osovina, zbog njihovog uvijanja, smanjuje se točnost usklađenosti međusobnog rasporeda dijelova stroja. U sustavu električnih osovina, udaljenost između osovina ne može utjecati na točnost rada.
Pri korištenju električne osovine eliminiraju se mehanički spojevi čeljusti s vretenom i kinematički dijagram je znatno pojednostavljen. Značajan nedostatak sustava električnih osovina u strojevima za rezanje teških metala je mogućnost oštećenja skupog dijela tijekom nestanka struje, jer odmah dolazi do neusklađenosti. U nekim slučajevima, u takvoj nezgodi, oštećenje obratka može se spriječiti brzim automatskim povlačenjem alata.
Za strojarstvo je zanimljiva shema s dva identična asinkrona motora s faznim rotorima (slika 4). Budući da je krug oba rotora zatvoren na reostat R, kada su motori spojeni na izmjeničnu mrežu, oba se rotora počinju okretati.
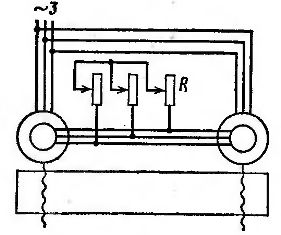
Riža. 4. Shema sinkrone komunikacije s rotacijskim reostatom
Osim struja koje teku u namotima rotora i reostata, struja izjednačenja teče u krugu rotora oba stroja. Prisutnost ove struje uzrokuje pojavu sinkronizirajućeg momenta, zbog čega se strojevi sinkronizirano okreću. Ovaj sustav se može koristiti za podizanje i spuštanje poprečnih krakova velikih blanjalica, glodalica i karusela.
Zahvaljujući sustavu električnih osovina rješava se problem koordiniranog kretanja transportera koji su dio proizvodnog kompleksa.Najpraktičnija primjena u ovom slučaju dobiva se od varijante sinkrone rotacije motora sa zajedničkim pretvaračem frekvencije.
Osim razmatranih električnih osovinskih sustava za strojogradnju, razvijeni su i korišteni i drugi izmjenični strojni sustavi, uključujući jednofazne sustave i sustave sa sinkronim motorima posebne konstrukcije.