Usporedba kontaktnih i beskontaktnih putnih sklopki
U industrijskoj automatizaciji, sklopovi se široko koriste putne (pozicijske) sklopke i sklopke višestruki dizajni dizajnirani za kontrolu položaja različitih proizvodnih mehanizama i temeljeni na transformaciji kretanja tih mehanizama u električnom signalu.
Pozicijski prekidači također se mogu koristiti za obavljanje funkcija koje nisu kontrola položaja proizvodnih mehanizama, na primjer, kontrola kuta rotacije, razine, pritiska težine itd.

Prekidači smjera su uređaji diskretnog djelovanja koji rade na principu povećanja, odnosno reagiraju samo na promjenu položaja upravljanog mehanizma. Izlazni signal putnih skretnica dvosmislena je funkcija kretanja mehanizma iz zadane početne pozicije.
Vrste cestovnih skretnica
Ovisno o načelima pozicijskog preklapanja, načini preklapanja se dijele na:
-
mehanički kontakt sa sklopnim kontaktima i kontaktno osjetljivim elementima;
-
statički kontakt (magnetomehanički), čiji je osjetljivi element beskontaktan, a sklopni element je kontakt;
-
statički beskontaktni, osjetljivi i sklopni elementi od kojih se izrađuju beskontaktni.
U kontaktnoj prirodi "uklopno-stop" čvora, odnosno u kontaktnoj prirodi veze pogonskog elementa (ulaznog upravljačkog signala) s osjetljivim elementom, ovaj čvor se naziva mehanički, a u beskontaktnom - statički. .
Ovisno o izvedbi, prekidači mogu biti kombinirani ili odvojeni. U prvom slučaju, osjetljivi i sklopni elementi smješteni su u jednom kućištu i konstruktivno su izvedeni kao cjelina. U drugom, osjetljivi element može se nalaziti na udaljenosti od nekoliko desetaka i stotina metara od prekidača.
Izobličenje magnetskog polja sklopke puta postiže se promjenom parametara magnetski krug osjetljivi element. Promjenjivi parametri također mogu biti aktivna površina i veličina zračnog raspora magnetska permeabilnost magnetski krug.
Trenutno se područje primjene mehaničkih kontaktnih pozicijskih sklopki u industrijskoj automatizaciji sužava, te se postavlja pitanje beskorisnosti pozicijskih sklopki ovog tipa za potrebe izgradnje sustava automatskog upravljanja.
Potonji je uzrokovan sljedećim:
-
Složenost dizajna sklopa prekidača, zbog strogosti zahtjeva u pogledu granica dopuštenih fluktuacija niza parametara, što uzrokuje značajne poteškoće u njegovoj izradi i podešavanju.
-
Relativno visoka kritičnost karakteristika točnosti ovog uređaja na utjecaj destabilizirajućih čimbenika (trošenje kontaktnih površina, labavost pričvrsnih elemenata, neusklađenost pokretnih elemenata itd.).
Brojna konstrukcijska rješenja mehanizama uopće se ne mogu implementirati na temelju mehaničkih kontaktnih sklopki. To uključuje mehanizme koji zahtijevaju visoke dopuštene razine brzine i učestalosti pokreta.
Ako se potrebna brzina rada cestovne sklopke može smanjiti zbog dodatnih kinematičkih veza mehanizma, koji, između ostalog, pogoršavaju karakteristike kvalitete upravljačkog sustava (osobito parametre točnosti), tada je dopuštena radna frekvencija ( rezolucija) ne može biti povećan strukturalnim komplikacijama.
Vidi također: Ugradnja graničnih sklopki i prekidača
U ovom slučaju, koji je razlog za široku upotrebu mehaničkog kontaktnog principa prebacivanja položaja? Odgovor na ovo pitanje treba potražiti u dva aspekta: u postojećim principima izgradnje sustava automatskog upravljanja iu prednostima sklopnog sklopa kontaktnog puta.
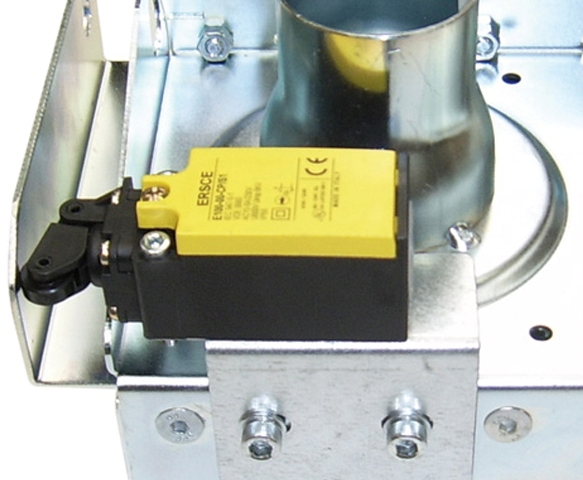
Prednosti prekidača kontaktnog puta
Mehaničke kontaktne sklopke, obično izvedene s višestrukim izlazom, karakteriziraju sljedeće prednosti:
-
visok omjer prebacivanja;
-
visoka specifična upravljačka snaga (omjer uključene snage prema ukupnim dimenzijama);
-
univerzalnost, odnosno mogućnost prebacivanja krugova izravne i izmjenične struje;
-
veliki raspon uključenih napona;
-
zanemariva unutarnja potrošnja energije (mala vrijednost prijelaznog otpora kontakata u zatvorenom stanju);
-
niska ovisnost točnosti i stabilnosti rada o promjenama kontrolirane snage.
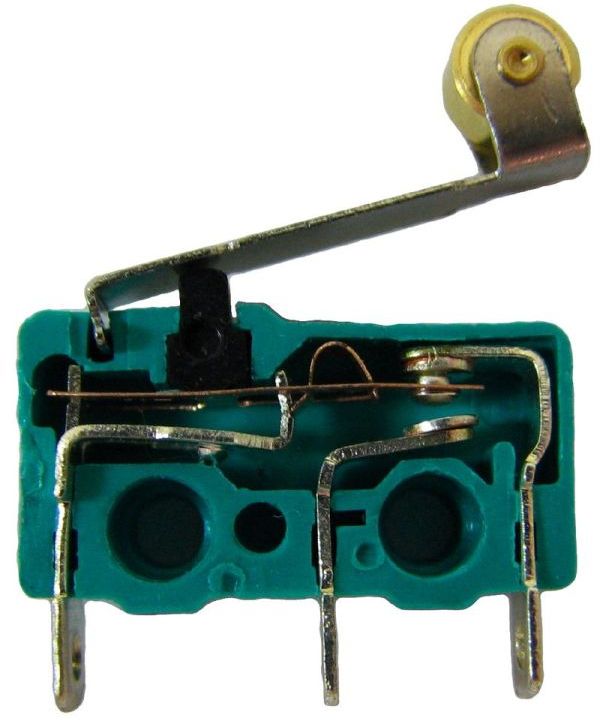
Nedostaci prekidača kontaktnog puta
Načelo mehaničkog kontakta ovih uređaja često ne dopušta ispunjavanje povećanih zahtjeva za pouzdanošću, trajnosti i točnosti sustava automatizacije. Osim toga, mehanički kontaktni prekidači vrlo su osjetljivi na učinke različitih klimatskih čimbenika (osobito pri niskim temperaturama).
Mehaničke kontaktne sklopke karakteriziraju ograničene dopuštene razine najveće i minimalne brzine kretanja uklopnog zaustavljanja, koje su u rasponu od 0,3 — 30 m / min, a povećanje brzine uklopnog zaustavljanja iznad dopuštene razine dovodi do naglog smanjenja u mehaničkoj trajnosti na prekidaču.
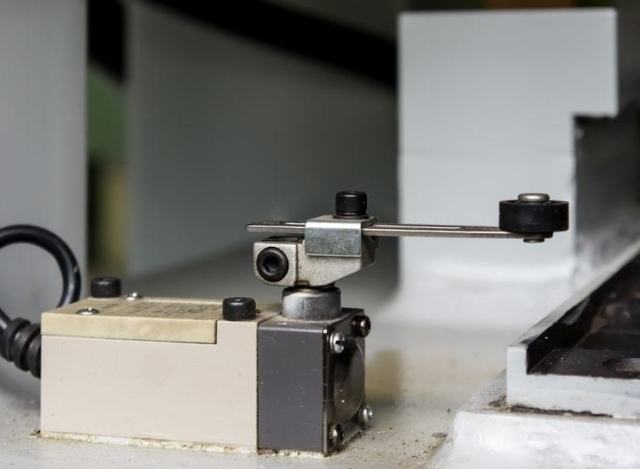
Kod ovakvih skretnica dopuštena odstupanja smjera djelovanja sklopne sile u odnosu na os poluge su vrlo mala, a prekoračenje dovodi do mehaničkih oštećenja, posebno kod skretnica s prednjom poteznom polugom.
Da bi se dobile izlazne karakteristike releja (upravljačke karakteristike), u dizajnu takvih sklopki predviđeni su uređaji s okidačem i oprugom. Potreban stupanj izlaznih karakteristika releja postiže se po cijenu značajnog smanjenja trajnosti prekidača zbog velikih dinamičkih naprezanja koja se javljaju u okidaču u trenutku aktiviranja.
U mehaničkim trenutnim kontaktnim sklopkama širina petlje histereze (diferencijala hoda) izlazne karakteristike doseže značajnu vrijednost, što je potpuno neprihvatljivo za niz tehnoloških procesa zbog neproduktivnog povećanja trajanja ciklusa obrade.
Smanjenje razlike u hodu ovih mjenjača povezano je s povećanjem složenosti njihovog dizajna ili povećanjem njihove veličine. Dodatno, u nekim slučajevima potrebne su značajne mehaničke sile za aktiviranje mehaničkih kontaktnih prekidača.
Prednosti i nedostaci blizinskih prekidača
Gore navedene okolnosti dovode do potrebe za razvojem uređaja koji su lišeni navedenih nedostataka, a koji su ujedno sposobni obavljati slične funkcije. Takvi uređaji su prekidači blizine, čije prednosti uključuju:
-
značajna trajnost uz visoku pouzdanost i visoku dopuštenu radnu frekvenciju;
-
nema potrebe za mehaničkim naporom pri pokretanju, niska osjetljivost na vibracije, ubrzanje itd.;
-
beznačajna osjetljivost parametara na promjene u relativno širokom rasponu vanjskih uvjeta;
-
poboljšanje uvjeta operativnih usluga.
Zbog niske razine povratne veze blizinskog prekidača, postiže se značajno pojednostavljenje konstrukcije zaustavnog prekidača uz zadržavanje visoke stabilnosti karakteristika točnosti tijekom vremena. Osim toga, nepostojanje električnih i mehaničkih kontakata osigurava sigurnost ovih uređaja od požara i eksplozije, što značajno proširuje područje njihove moguće primjene.
Jedan od značajnih nedostataka beskontaktnih krajnjih prekidača je složenost implementacije mnogih modifikacija dizajna koje se lako implementiraju u mehaničkim kontaktnim krajnjim prekidačima.
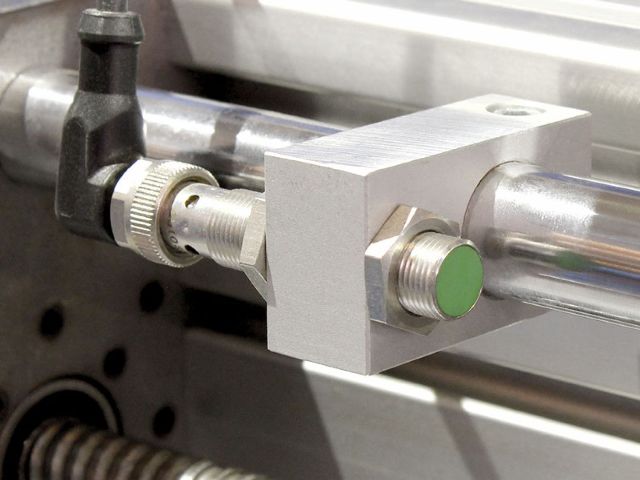
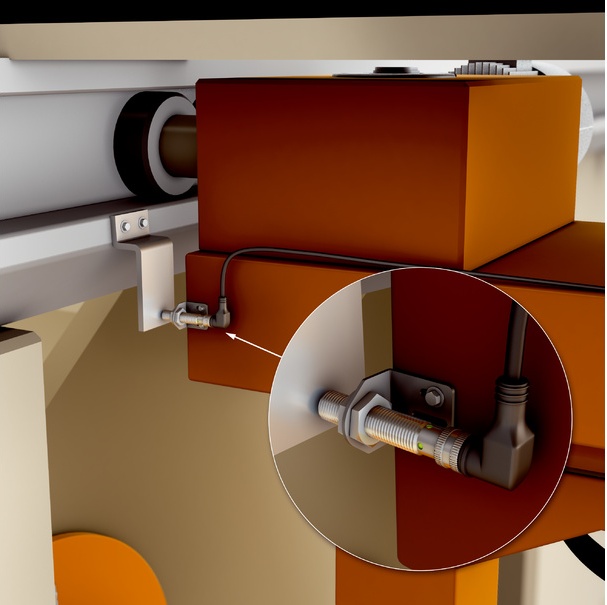
Uređaj s prekidačem blizine
Načelo rada statičkih bezkontaktnih putnih sklopki parametarskog tipa temelji se na korištenju izobličenja magnetskog ili električnog polja koje stvara osjetljivi element kada se u njegovom području pojavi pogonski element, uslijed čega dolazi do neuravnoteženog stanja javlja se u električnom krugu sklopke i okida se izlazni uređaj.
Statički prekidači blizine najčešće se izrađuju s jednim izlaznim krugom, au nekim prekidačima aktiviranje je popraćeno pojavom signala na izlazu (učinak izravnog prebacivanja), u drugima - nestankom (efekt obrnutog prebacivanja), što je ekvivalentno na kontakte za zatvaranje i otvaranje mehaničkih kontaktnih staza.
Ako u krugu relejnog blizinskog prekidača postoji element za pojačanje, izlazni parametar senzorskog elementa može biti u stalnoj funkcionalnoj ovisnosti o kontroliranom gibanju.
Trenutno se koriste brojne modifikacije dizajna beskontaktnih putnih prekidača, koje se razlikuju u razini osjetljivosti (veličini radnog razmaka), položaju utora ili ravnini osjetljivog elementa u odnosu na ravninu montaže, smjeru vodeće žice, broj koraka osjetnog elementa (za dizajn s utorima), dubina utora, duljina spojnih žica, razina napona napajanja, priroda zaštite od utjecaja okoline itd.
Mogućnosti korištenja beskontaktnih pokretnih sklopki određene su parametrima njihovih električnih i mehaničkih karakteristika.
Električni parametri uključuju:
- prirodu izlaznog signala i broj izlaznih krugova;
- potrošnja i izlazna snaga;
- oblik izlaznog signala; koeficijent sklopke za otpor i napon (za transformatorske sklopke);
- karakteristike vremena (vrijeme okidanja i otpuštanja) i učestalost paljenja (razlučivost);
- razine i oblik napona napajanja, kao i dopuštene granice njihovih odstupanja.
Parametri mehaničke izvedbe uključuju:
- osjetljivost (veličina radnog zazora),
- dimenzije i priključne dimenzije;
- karakteristike točnosti (glavne i dodatne pogreške) i razlika u hodu;
- karakteristike ugradnje (vrste sklopnih kočnica i način njihove ugradnje, razina povratne veze, način montiranja i ugradnje sklopke);
- stupanj zaštite od buke.
Za više informacija o uređaju i prekidačima proximity prekidača pogledajte ovdje: Beskontaktni senzori položaja mehanizama
Ivenski Yu. N.Beskontaktni putni prekidači u industrijskoj automatizaciji