Beskontaktni magnetski ležajevi: uređaj, mogućnosti, prednosti i nedostaci
Govoreći o magnetskim ležajevima ili beskontaktnim ovjesima, ne možemo ne primijetiti njihove izvanredne kvalitete: nije potrebno podmazivanje, nema trljajućih dijelova, stoga nema gubitaka uslijed trenja, iznimno niska razina vibracija, velika relativna brzina, niska potrošnja energije, automatska kontrola i nadzor ležaja sustav, sposobnost brtvljenja.
Sve ove prednosti čine magnetske ležajeve najboljim rješenjima za mnoge primjene: za plinske turbine, za kriogenu tehnologiju, u brzim električnim generatorima, za vakuumske uređaje, za razne strojeve za rezanje metala i drugu opremu, uključujući visokoprecizne i velike brzine (oko 100.000 o/min), pri čemu je važno odsustvo mehaničkih gubitaka, smetnji i grešaka.
U osnovi, magnetski ležajevi se dijele na dvije vrste: pasivni i aktivni magnetski ležajevi. Izrađuju se pasivni magnetski ležajevi na bazi permanentnih magneta, ali ovaj pristup je daleko od idealnog, pa se rijetko koristi.Fleksibilnije i šire tehničke mogućnosti otvaraju aktivni ležajevi, kod kojih se izmjeničnim strujama u žičanim namotima stvara magnetsko polje.
Kako radi beskontaktni magnetski ležaj

Rad aktivnog magnetskog ovjesa ili ležaja temelji se na principu elektromagnetske levitacije — levitacije pomoću električnih i magnetskih polja. Ovdje se rotacija osovine u ležaju događa bez fizičkog kontakta površina jedna s drugom. Zbog toga je podmazivanje potpuno isključeno i još uvijek nema mehaničkog trošenja. Time se povećava pouzdanost i učinkovitost strojeva.
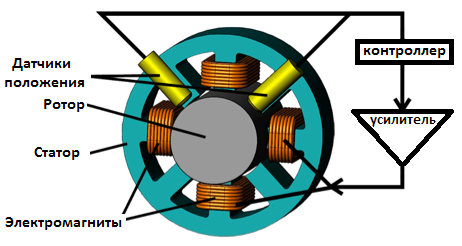
Stručnjaci također ističu važnost praćenja položaja osovine rotora. Sustav senzora kontinuirano prati položaj osovine i daje signale automatskom upravljačkom sustavu za precizno pozicioniranje podešavanjem pozicionog magnetskog polja statora - privlačna sila na željenoj strani osovine se pojačava ili slabi podešavanjem struje u namoti statora aktivnih ležajeva .
Dva konusna aktivna ležaja ili dva radijalna i jedan aksijalni aktivni ležaj omogućuju da rotor visi bez kontakta doslovno u zraku. Sustav upravljanja gimbalom radi kontinuirano, može biti digitalni ili analogni. To osigurava visoku čvrstoću zadržavanja, veliku nosivost i podesivu krutost i apsorpciju udaraca. Ova tehnologija omogućuje ležajevima rad na niskim i visokim temperaturama, u vakuumu, pri velikim brzinama iu uvjetima povećanih zahtjeva za sterilnošću.
Aktivni beskontaktni uređaj s magnetskim ležajem
Iz navedenog je jasno da su glavni dijelovi sustava aktivnog magnetskog ovjesa: magnetski ležaj i automatski elektronički upravljački sustav. Elektromagneti cijelo vrijeme djeluju na rotor s različitih strana i njihovo je djelovanje podređeno elektroničkom sustavu upravljanja.

Rotor s radijalnim magnetskim ležajem opremljen je feromagnetskim pločama na koje djeluje retencijsko magnetsko polje iz namota statora, uslijed čega rotor visi u središtu statora bez dodirivanja. Induktivni senzori nadziru položaj rotor u svakom trenutku. Svako odstupanje od ispravnog položaja rezultira signalom koji se šalje upravljaču da vrati rotor u željeni položaj. Radijalni zazor može biti između 0,5 i 1 mm.
Magnetski potporni ležaj funkcionira na sličan način. Elektromagneti u obliku prstena pričvršćeni su na osovinu vučnog diska. Elektromagneti se nalaze na statoru. Aksijalni senzori nalaze se na krajevima osovine.
Za pouzdano zadržavanje rotora stroja tijekom njegovog zaustavljanja ili u trenutku kvara sustava za zadržavanje koriste se sigurnosni kuglični ležajevi koji su fiksirani tako da je razmak između njih i osovine jednak polovici razmaka magnetskog ležaja. .
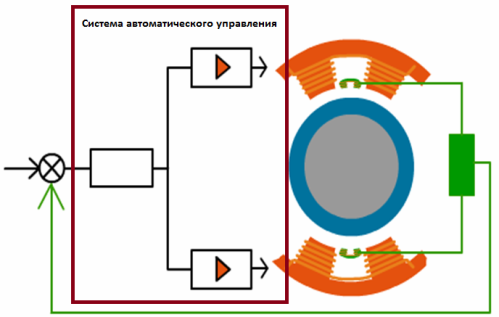
Sustav automatskog upravljanja nalazi se u ormaru i odgovoran je za pravilnu modulaciju struje koja teče kroz elektromagnete u skladu sa signalima senzora položaja rotora. Snaga pojačala povezana je s maksimalnom snagom elektromagneta, veličinom zračnog raspora i vremenom reakcije sustava na promjenu položaja rotora.
Mogućnosti za beskontaktne magnetske ležajeve
Najveća moguća brzina rotora u radijalnom magnetskom ležaju ograničena je samo sposobnošću feromagnetskih ploča rotora da se odupru centrifugalnoj sili. Obično je granica za perifernu brzinu 200 m/s, dok je za aksijalne magnetske ležajeve granica ograničena otporom čeličnog lijeva graničnika — 350 m/s s običnim materijalima.
Primijenjeni feromagneti također određuju maksimalno opterećenje koje ležaj može podnijeti uz odgovarajući promjer i duljinu statora ležaja. Za standardne materijale, maksimalni tlak je 0,9 N/cm2, što je manje nego kod konvencionalnih kontaktnih ležajeva, ali se gubitak opterećenja može nadoknaditi velikom perifernom brzinom s povećanim promjerom osovine.
Potrošnja energije aktivnog magnetskog ležaja nije velika. Najveći gubici u ležaju su zbog vrtložnih struja, ali to je deset puta manje od energije koja se gubi pri korištenju konvencionalnih ležajeva u strojevima. Isključujući spojke, toplinske barijere i druge uređaje, ležajevi učinkovito rade u vakuumu, heliju, kisiku, morskoj vodi itd. Raspon temperature je od -253 °C do +450 °C.
Relativni nedostaci magnetskih ležajeva
U međuvremenu, magnetski ležajevi također imaju nedostatke.
Prije svega, potrebno je koristiti pomoćne sigurnosne kotrljajuće ležajeve, koji mogu izdržati najviše dva kvara, nakon čega ih je potrebno zamijeniti novima.
Drugo, složenost sustava automatskog upravljanja, koji će, ako ne uspije, zahtijevati složene popravke.
Treće, temperatura namota statora ležaja raste pri velikim strujama - namoti se zagrijavaju i potrebno im je vlastito hlađenje, po mogućnosti hlađenje tekućinom.
Konačno, potrošnja materijala za beskontaktni ležaj je velika jer površina ležaja mora biti velika da bi podnijela dovoljnu magnetsku silu - jezgra statora ležaja je velika i teška. Plus fenomen magnetskog zasićenja.

Ali unatoč prividnim nedostacima, magnetski ležajevi sada se naširoko koriste, uključujući visoko precizne optičke sustave i laserske instalacije. Na ovaj ili onaj način, od sredine prošlog stoljeća, magnetski ležajevi su se stalno poboljšavali.